A dinamikus rendszerek – melyek a legtöbb esetben folytonos állapotváltozással jellemezhetők (égitestek mozgása, hőmérsékletváltozás, stb.) - számítógépes modellszimulációja nem képes a tökéletesen egzakt megoldás előállítására, ehelyett diszkrét számítási eredmények sorozatával közelíti az elméleti (analitikus) megoldást.
A diszkrét rendszerekben a változók értékének számítása időlépcsőnként történik, pl. bankbetétünk után a kamatszámítás. A modell futtatásakor a program sztenderd numerikus számítási módszereket használ az egyenletrendszerek megoldásához.
Jelöljük:
x(t) : x tároló (állapotváltozó) értéke t időpontban
F = F(x(t)) : anyagáramlás (folyamatváltozó) értéke x tárolóhoz t időpontban
A tároló értékét a (t+Δt) időpontban megadja a következő véges differencia egyenlet:
Azaz F anyagáramlás értékét megadja az x tároló értékének Δt időtartam alatti megváltozása. Áttérve a differenciális formulára (Δt →0):
Ahonnan:
Ezt a kifejezést nevezik az elsőrendű differenciálegyenlet merőleges, vagy az Euler-integráljának. A valós folytonos rendszerekben tehát az állapotváltozó értékét a folyamatváltozó integrálásával határozhatjuk meg. A tárolók a modellekben a rendszerelemek állapotát, vagyis a változások eredőjét fejezik ki.
A folytonos változást numerikusan kifejezni nem lehetséges, ezért a változók értékét kis időlépésenként számítjuk. A szimuláció során minden időlépésben az állapotváltozók a rendszer pillanatnyi állapotának megfelelő értéket vesznek fel. Minden időtartamra a rendszer állapotváltozásának és az állapotváltozók differenciáinak számítása a feladat, amely integrálszámítási problémát jelent.
A véges differenciaegyenletek megoldása elméletileg egyszerű és a következő lépésekből áll:
1. Inicializálási fázis: az összes szükséges egyenlet sorbarendezése; az állapot- és folyamatváltozók kezdőértékeinek számítása.
2. Iterációs fázis: becslés az állapotváltozó értékének Δt időtartam alatti megváltozására. A tároló új értékének számítása a becslés alapján; a tárolók új értékének felhasználásával a folyamatváltozók új értékének számítása, majd a szimuláció léptetése Δt-vel. Az iteráció leállítása, ha tstart ≥ tstop.
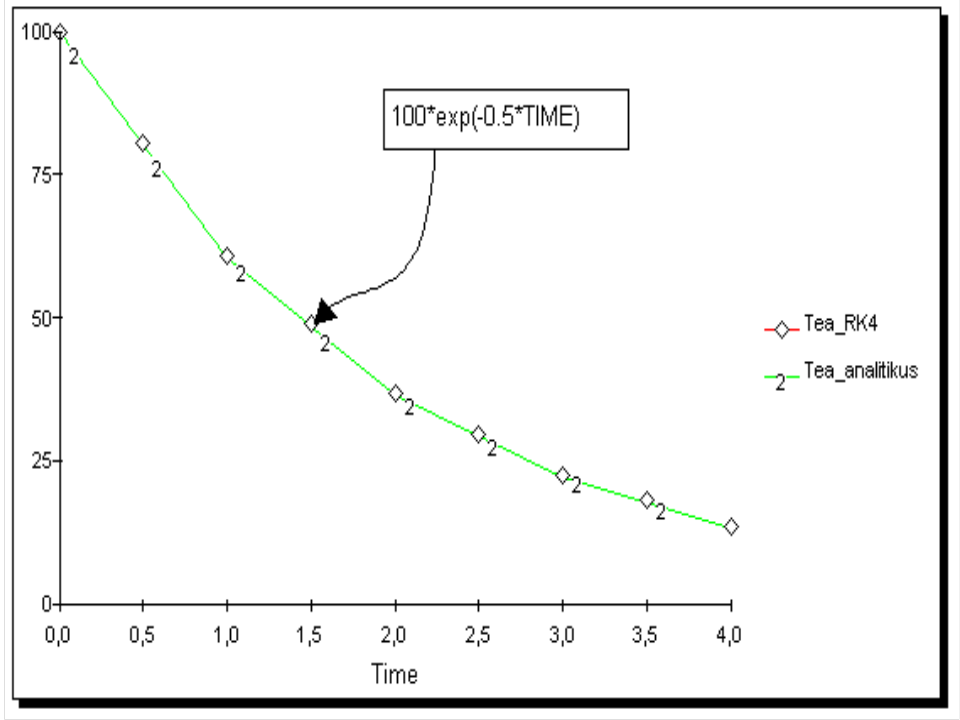
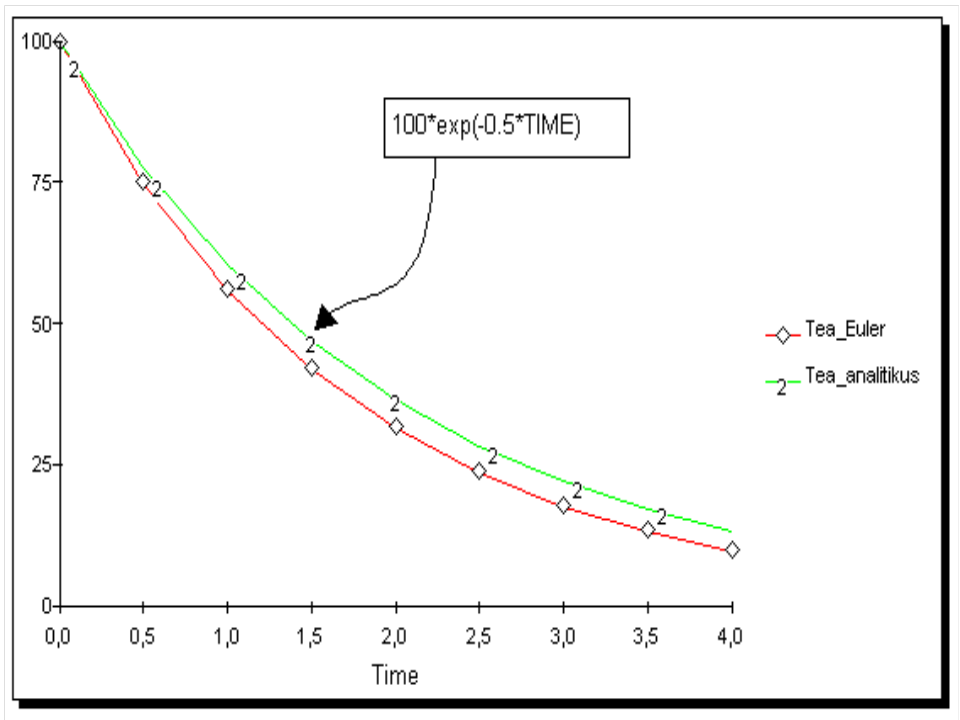
A legkritikusabb az iterációs fázis első lépése: hogyan becsülhető meg az állapotváltozó értékének Δt alatti megváltozása? A dinamikus rendszer-szimulációs programok erre a becslésre általában az ún. Euler- és Runge-Kutta (másod-, harmad-, negyedrendű) numerikus integrálási módszereket alkalmazzák. Egyszerű példa: Newton-féle hűlési törvény analitikus megoldása és numerikus számítása (animáció).
1.Euler-módszer
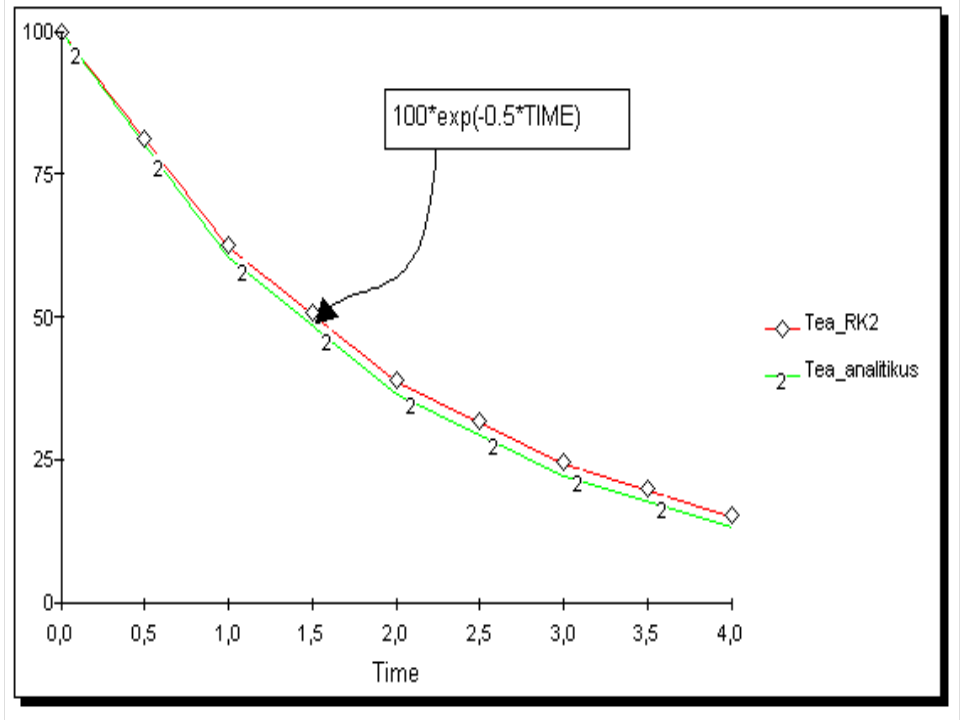
Összehasonlítva a grafikonokat láthatjuk, hogy a választott megoldási módszertől függően eltérés adódik az analitikus és a numerikus megoldás között (2.4-6. ábrák). Az analitikus és az Euler-módszerrel kapott görbe közötti eltérés az integrálási hiba, amely az Euler-módszernél a legnagyobb. A Δt időlépcső csökkentésével a hiba kisebb lesz, zérus közelében az Euler-módszer is az egzakt megoldást szolgáltatja. Ezzel viszont növekszik a számítási idő és a kerekítésnél elkövetett hiba. A Runge-Kutta módszerek nagyobb időlépcsőnél is pontosabb megoldást szolgáltatnak, viszont számítási igényük nagyobb az Euler-módszerénél.
2. Másodrendű Runge-Kutta-módszer (javított Euler-módszer)
2.5. ábra - Newton-féle hűlési törvény analitikus megoldása és numerikus számítása másodrendű Runge-Kutta-módszerrel
 |
3. Negyedrendű Runge-Kutta-módszer