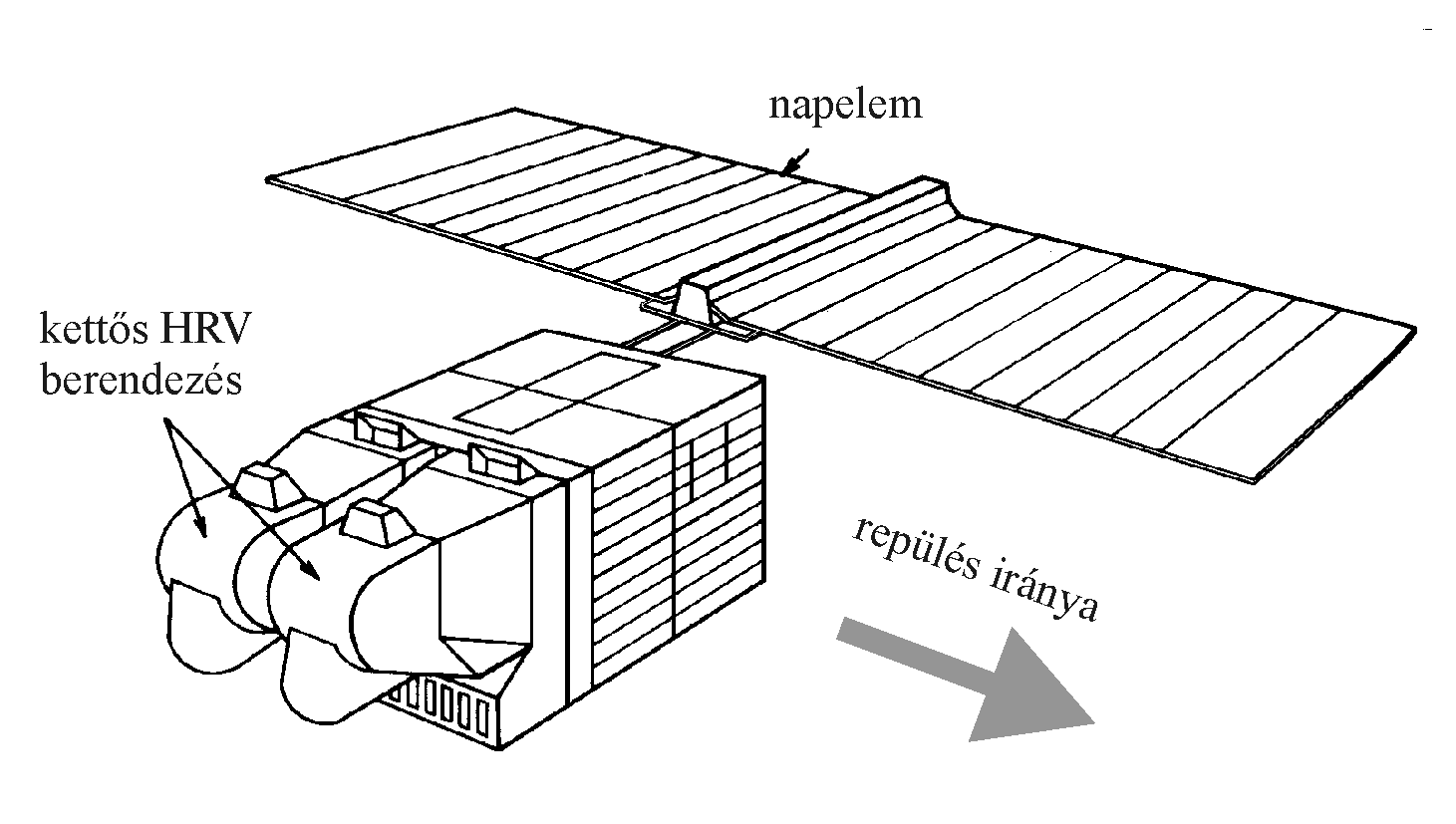
Az első, SPOT-1 nevű műholdat (5.1. ábra[41]), 1986. február 22-én a francia guyanai Kourou Rakétaközpontból indították útjára. A műhold új fejezetet nyitott a műholdas távérzékelés történetében, hiszen ez volt az első nem kísérleti jellegű műhold (lásd pl. a MOMS szenzor), melyen vonalsoros (linear array) szenzort és az ún. push-broom felvételező technikát alkalmaztak. Szintén első volt abban a tekintetben, hogy optikai rendszere változtatható, irányítható volt. Ez lehetővé tette, hogy a függőleges, nadír helyzetű képek mellett oldalirányú (off nadír) felvételeket is készítsen. Lehetőség nyílt a teljes képű sztereografikus felvételek készítésére oly módon, hogy két különböző pályán is teljes képi fedést lehetett elérni ugyanarról a területről.
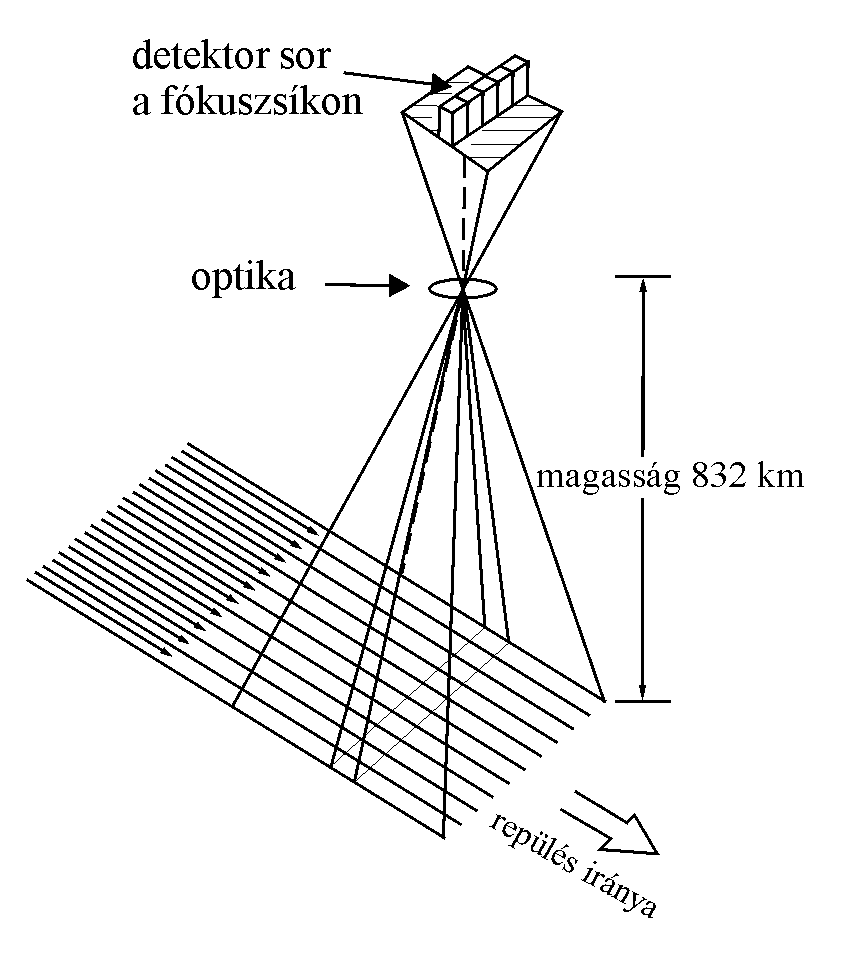
A Landsat sorozathoz hasonlóan a SPOT-1 is cirkuláris, közel-poláris, napszinkron pályán keringett. A periódus idő 101,4 perc, pályamagasság 832 km, az inklináció szöge 98,7° volt. A SPOT-1 leszálló pályáján helyi idő szerint mindig délelőtt 10 óra 30 perckor haladt át a földrajzi Egyenlítő fölött. Így az északi szélességek fölött mindig valamivel 10 óra 30 perc előtt, a déli szélességek felett ezen idő után haladt át. Pl. a 40° északi szélességet 10 óra után, a 40° déli szélességet 11 óra előtt néhány perccel keresztezte.
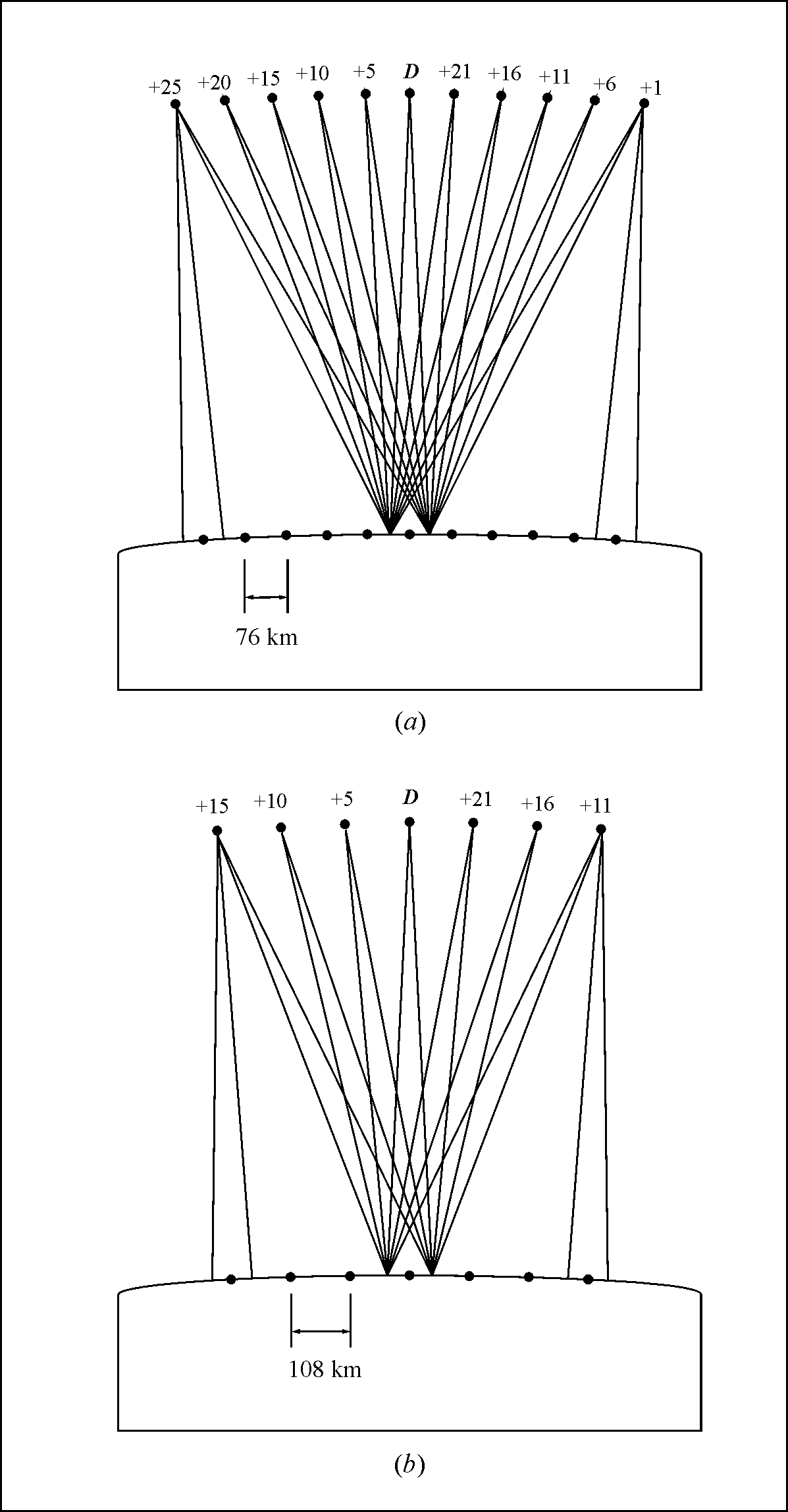
A SPOT-1 pályája 26 naponként ismétlődött, vagyis a földfelszín egy adott pontját ilyen gyakorisággal lehetett ugyanabból a látószögből vizsgálni. A rendszer már említett változtatható tükörállása miatt, a pályán oldalirányban is vizsgálható egy terület 1 és 4 (esetenként 5) naponként újra, függően a terület szélességi pozíciójától. Ha tekintünk egy olyan 26 napos periódust, melynek első és utolsó napja adott alkalmat a közvetlen nadír helyzetű képkészítésre, akkor a 45° szélességen 11 képkészítési alkalom adódott (D = kezdő vagy nadír nap): a D, D+1, +5, +6, +10, +11, +15, +16, +20, +21, és a D+25 nap (5.2a.ábra). Az Egyenlítő egy adott pontján összesen 7 (D, D+5, +10, +11, +15, +16, +21 nap) lehetőség volt a felvételezésre (5.2b. ábra)[42].
Az oldalratekintés megnöveli a lehetséges fedési gyakoriságok számát olyan területek fölött, melyek gyakran felhővel fedettek, másrészt lehetőséget biztosít egy terület rövid idő alatti többszörös felvételezésére (pl. egymást követő napokon, több napon vagy héten keresztül) nagy sűrűséggel. Igaz, az időkülönbség miatt a sztereofelvételek változó körülmények (pl. felhőborítottság) között készülhetnek.
A SPOT 1-2 fedélzeti szenzorai
A rendszer tömege kb. 1750 kg, a műhold központi teste 2x2x3,5 m-es. A napelemek oldalirányú kiterjedése 15,6 m. A SPOT modulszerű, amely biztosítja a különböző műszerek cserélhetőségét a fedélzeten. Ezért az elkövetkező SPOT műholdak esetében jelentősebb módosítások nélkül megoldható a szenzorok cseréje.
A SPOT-1 fedélzeti szenzora két független nagyfelbontású képkészítő, ún. HRV (High-Resolution-Visible imaging system) rendszert és segéd mágnesszalag egységet tartalmazott. Mindkét HRV két különböző módban készített képeket.
egy 10 m felbontású ún. pankromatikus módban (0,51–0,73 µm),
egy 20 m felbontású multispektrális (színes infravörös) módban a 0,50–0,59, a 0,61–0,68 és a 0,79–0,89 µm-es sávokban.
A HRV ún. push-broom érzékelési technikát alkalmazott. E felvételezési technika alapja a detektor sor (CCD - Charge Couple Device). A CCD egy 13x13 µm-es nagyságú szilícium chip (fotódióda), 5.3. ábra)[43], vagyis egy szilárd állapotú szenzor, mely érzékeli a sugárzást.
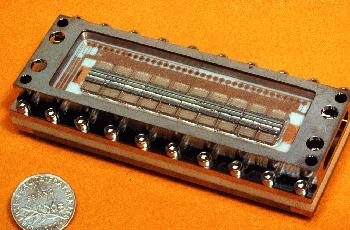
Amikor a fény vagy az infravörös sugárzás eléri a CCD felületét, elektromos töltés keletkezik. A töltés erőssége arányos a fény intenzitásával és az expozíciós idővel. A CCD sokkal nagyobb fényintenzitási tartományt képes érzékelni, mint a fényképezéskor használt filmek vagy a vidikon (televíziós) kamerák. Egy soros, 1-dimenziós CCD nagyon sok elemet tartalmazhat, pl. 10240, 6000 vagy 3000 detektor kerül egy sorba. Kis méretük, súlyuk, nagy fényérzékenységük miatt számos távérzékelési rendszerben alkalmazzák már.
A soros érzékelő merőlegesen helyezkedik el a műhold mozgási irányára. A detektorban rögzül és azonnal továbbadódik az érzékelt fény intenzitása, így létrejön a kép egy sora. Az újabb sor előállításához a szenzor elmozdul a vizsgált terület felett, s mintegy újra végigsöpri a felszínt. Ezért nevezik a rendszert push-broom, toló-pásztázó érzékelésnek.
A CCD előállítja a kép egy sorát a módnak megfelelő pixelszámmal. Ennek a rendszernek többek között az az előnye a forgótükrös-pásztázó rendszerrel szemben, hogy itt nincs szükség mozgó alkatrészekre. Ezzel nemcsak megnő a rendszer élettartama, de kiküszöbölődnek a tükör sebességváltozásaiból származó geometriai hibák. Ugyanakkor a vonalsoros detektorok alkalmazásával a felvételezési idő megnő és hosszabb lesz mint más technikát alkalmazó rendszerekben. Ez megnöveli a vonal-soros berendezések jel/zaj arányát, ezáltal tovább javul a kép minősége.
Ahhoz, hogy a soros detektor 2-dimenziós képet állítson elő, az érzékelő mozgására van szükség. Ez történhet úgy is, hogy a kamerát rögzítjük és a kamera optikai rendszerét mozgatjuk. A HRV szenzor úgy állított elő a képet, hogy a műhold folyamatos mozgása közben soronként készítette el a képet (5.4. ábra).
Mindegyik HRV négy db CCD alrendszert tartalmazott. A 6000-elemes soros érzékelő a pankromatikus módban az adatokat 10 m-es felbontásban rögzíti. A 3 db 3000-elemes érzékelő a multispektrális mód 3 sávját rögzíti 20 m-es felbontásban. Az analóg-digitális konverter az adatokat 0–255 közötti egész számokká alakítja át, az adatátviteli sebesség 25 Mbps. Mindegyik berendezés látószöge (AFOV) 4,13° és nadír helyzetben minden HRV kép szélessége 60 km. A HRV optikai rendszerének első eleme egy síktükör, amely földi parancsra elforgatható ±27°-kal (5.5. ábra)[44].
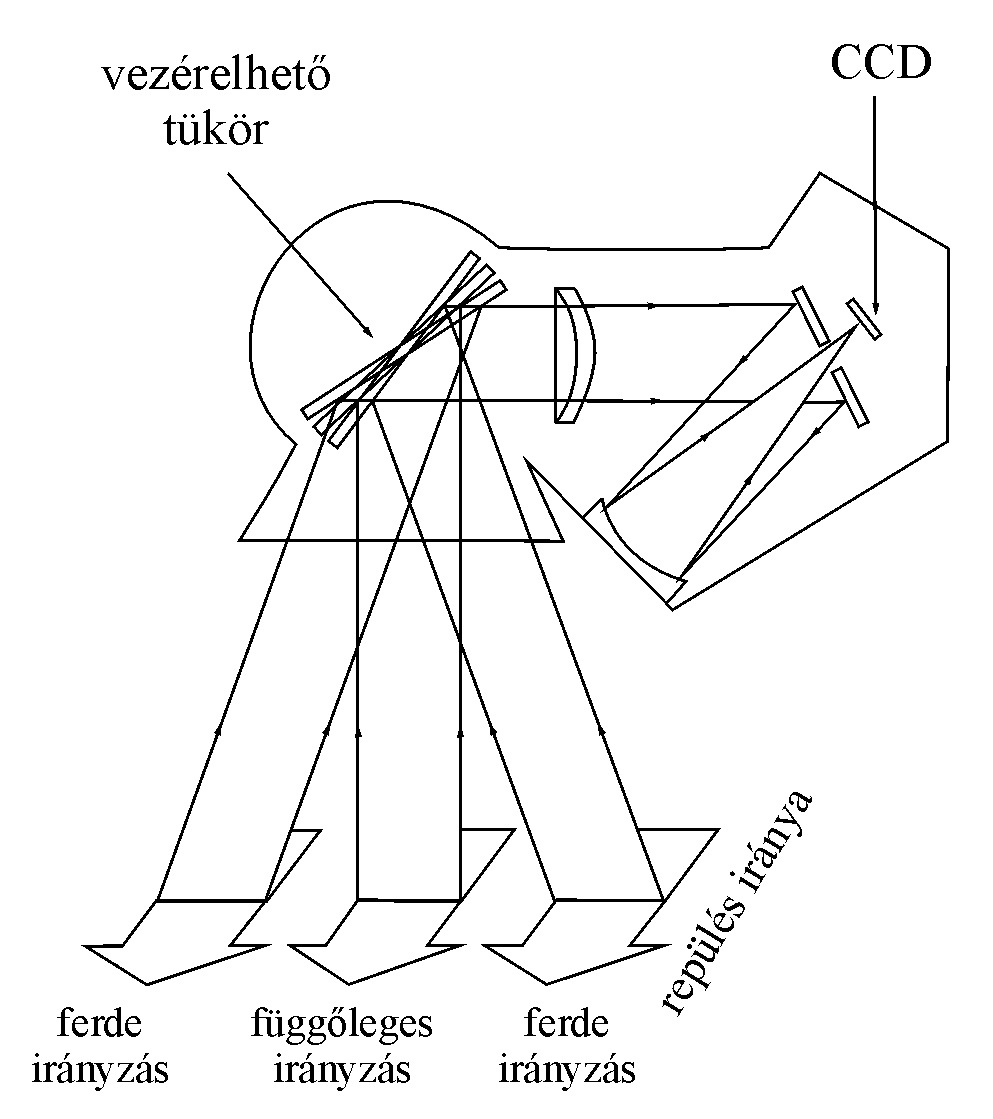
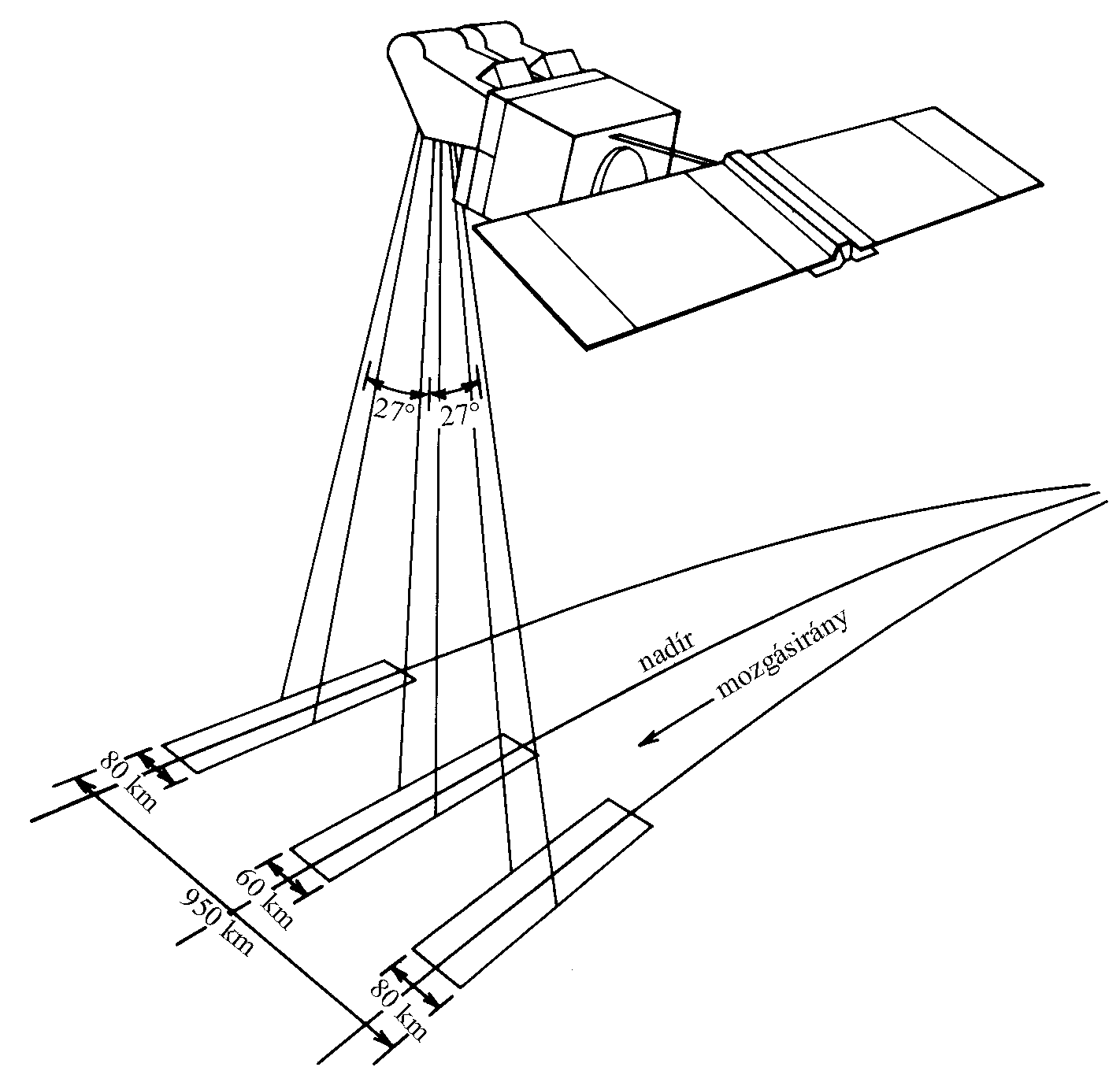
Az elforgatás 45 lépésben 0,6°-os lépésközzel végezhető el. Ez megengedi azt, hogy az eszköz bármelyik olyan pontról képet tud készíteni, amelyik a nadír helyzethez képest, 475 km-es sávon belül fekszik a műhold földi pályától jobbra vagy balra (5.6. ábra). A rálátás szögének változása miatt természetesen nő az érzékelt terület nagysága is. A 27°-os maximális oldalirányú tükörállásnál a lefedett terület szélessége már 80 km (romlik a geometriai felbontás). A tükör a Földről programozható a megrendelő igénye vagy a bekövetkezett esemény elhelyezkedésének megfelelően.
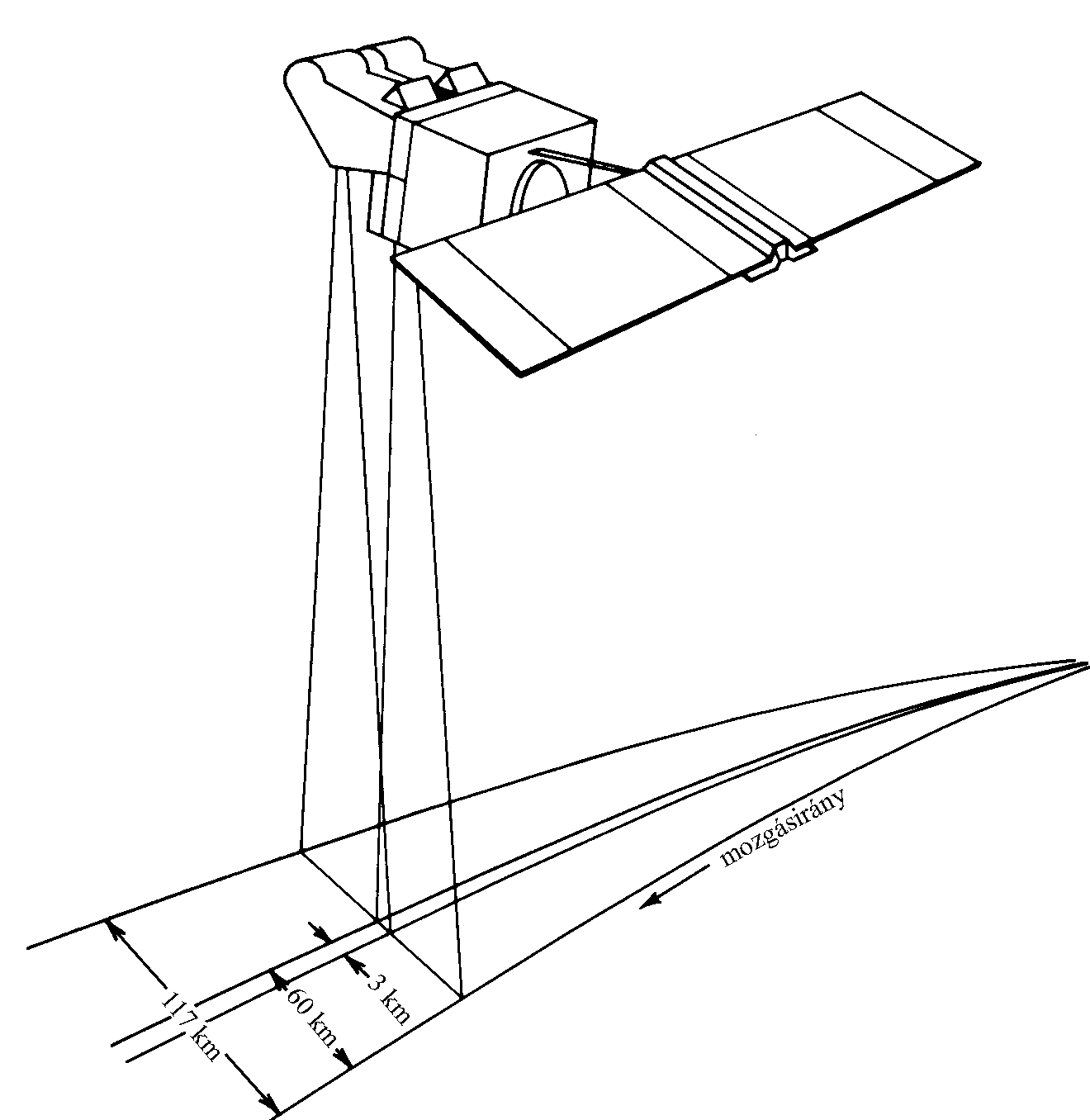
Amikor a két szomszédos HRV nadírhelyzetben szomszédos területeket fed le, a teljes képszélesség, a két kép közötti 3 km-es átfedés miatt 117 km (5.7. ábra). Bár mindkét HRV képes egyidejűleg pankromatikus és multispektrális kép készítésére 4 adatáramban, de csak 2 adatáram átvitele lehetséges egyidejűleg. Így a 117 km széles területről vagy csak pankromatikus vagy csak multispektrális adat továbbítható, egyszerre mindkettő nem.
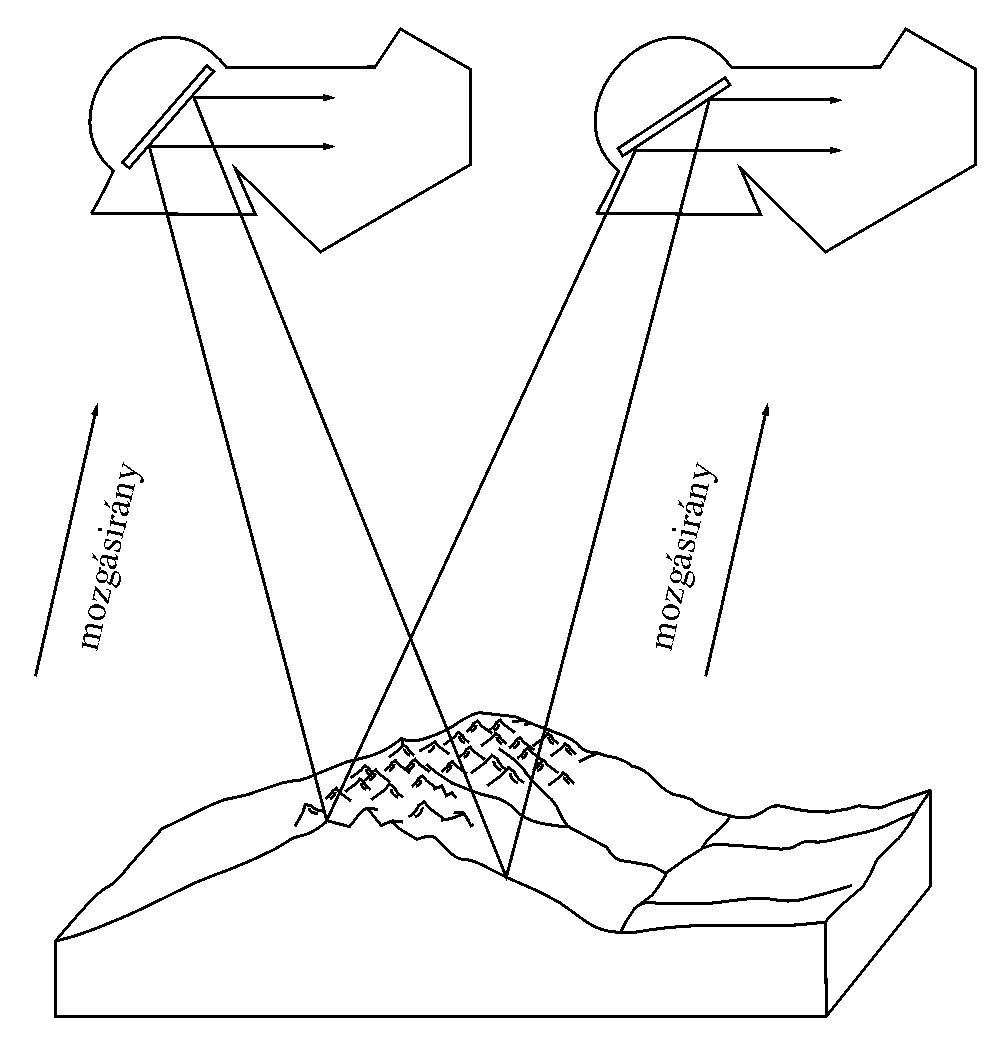
A HRV oldalirányú (nem nadír helyzetű) képkészítési lehetősége biztosítja a sztereografikus képkészítést is. A műhold különböző pályákon haladva ugyanarról a területről készít képet (5.8. ábra)[45], s így érhető el a sztereohatás.
A sztereografikus fedés gyakorisága az adott hely földrajzi helyzetétől, szélességi koordinátájának értékétől függ. A 45° szélességen (5.2a ábra), a 26 napos pályaciklus alatt 6 lehetőség van, hogy egymást követő napokon készüljön sztereofedés: D és D+1, D+5 és D+6, D+10 és D+11, D+15 és D+16, D+20 és D+21, valamint a D+25 és a következő ciklus D napján. Az Egyenlítőn (5.2b ábra) csak 2 lehetőség nyílik a sztereokép készítésre két egymást követő napon (D+10 és D+11, D+15 és D+16 napokon). A képközéppontok horizontális távolságának és a vertikális magasságnak az aránya (bázisviszony) változik a szélességgel. A 45° szélességen kb. 0,5 és ez fokozatosan nő az Egyenlítő felé haladva, ahol kb. 0,75.
Ha a sztereografikus fedéskor nem szükséges, hogy a felvételek két egymást követő napon készüljenek, akkor a lehetséges sztereopárok száma tovább nőhet.
A megfigyelési eredmények folyamatosan a SPOT-1 fedélzeti számítógépe segítségével Toulouseba, Franciaországba és egyéb földi vevőállomáshoz továbbítódtak, miközben a műhold folytatta az útját.
A két HRV-t egymástól függetlenül kezeték. A Földről módosítható volt a két berendezés látószöge, a spektrális üzemmód, a képkészítés ideje és az adattovábbítás módja. Ha a műhold az állomás kb. 2600 km-es sugarú környezetében volt, az adatok általában közvetlenül a fogadóállomáshoz juttottak. Ebben a körzetben a műhold mindig legalább 5°-kal a horizont felett volt. A fedélzeti mágnesszalag egység tárolt adatait akkor továbbították a Földre, ha olyan terület képi feldolgozása folyt, amely kívül esett a vevőállomás adott körzetén. Ilyen esetekben a felvett képek folytatólagosan továbbítódtak Toulouseba vagy Kirunába (Svédország). Toulouseban pl. naponta 700 db 60x60 km-es SPOT-3 képet rögzítettek.
5.1. táblázat - A SPOT HRV 1-2 adattovábbítási lehetőségek
|
HRV 1 |
HRV 2 | |
|
1. |
XS+P |
- |
|
2. |
- |
XS+P |
|
3. |
XS |
P |
|
4. |
P |
XS |
|
5. |
XS |
XS |
|
6. |
P |
P |
XS = multispektrális adatátvitel, P = pankromatikus adatátvitel
Az első SPOT műhold 1986-os felbocsátása után, a sorozat további négy tagját indították el. A SPOT-2 műholdat 1990. január 22-én, SPOT-3-at 1993. szeptember 22-én, a SPOT-4-et 1998. március 24-én és legutoljára a SPOT-5-öt 2002. május 4-én bocsátották fel.
A SPOT-1 műhold tervezői a műhold élettartamát két és fél évre becsülték. Az 1986. február 22-én felbocsátott műhold majdnem 4 évet üzemelt és csak 1990. december 31-én végén helyezték üzemen kívül. Ekkor sem technikai hiba miatt vonult nyugalomba, továbbra is működőképes maradt, de felváltotta a SPOT-2 műhold. A SPOT-2 műhold 2004 elején még működött.
Az 1990-es évek elején az erőteljes felhasználói igény jelentkezése miatt a SPOT Image kérte a CNES-t, a műhold kezelőjét, hogy újra kapcsolja be a SPOT-1 műholdat. Ez a művelet 1992. március 20-án sikerült. Először ellenőrizték a fedélzeti képkészítő műszereket és újrakalibrálták a detektorokat. A műhold 1992. október végéig működött ismét, ekkor újra készenléti állapotba helyezték. Ezzel a SPOT-2 műholddal együtt, jelentősen hozzájárult a nyári vegetációs időszak, a tenyészidőszak monitoringjához.
[41] Lillesand-Kiefer: Remote sensing and Image Interpretation pp.584.
[42] Lillesand-Kiefer: Remote Sensing and Image Interpretation pp. 583.
[43] http://spot4.cnes.fr/spot4_gb/index.htm
[44] SPOT 4 Satellite, The Payload – in:http://spot4.cnes.fr/spot4_gb/index.htm
[45] Lillesand-Kiefer: Remote Sensing and Image Interpretation pp.587.