Az elektromágneses energia érzékelése történhet fotografikus vagy elektronikus úton. A fényképezéskor olyan érzékeny filmet használunk, mely kémiai folyamatok révén képes érzékelni és rögzíteni az energia-változásokat. A fényképezési eljárás számos előnnyel rendelkezik: viszonylag egyszerű és olcsó, nagyfokú térbeli felbontással rendelkezhet, valamint geometriai információkat hordozhat, melyek biztosítják a fotogrammetriai feldolgozás lehetőségét.
Az elektronikus szenzorok elektromos jelekké alakítják át az energia-változásokat. Ilyen rendszer, pl. a videokamera is. Bár bonyolultabbak és drágábbak, mint a fotografikus rendszerek, érzékenységük szélesebb spektrális sávra terjed ki, pontosan kalibrálhatók és lehetőség van közvetlen elektronikus adatátvitelre is.
A távérzékelésben a fénykép szót kizárólag a filmen rögzített képekre használjuk, míg a kép (image) sokkal általánosabb értelmű és a képi adatok mindenféle képi megjelenítésére vonatkozik. Egy hőtartományú szkenner (elektronikus szenzor) által rögzített kép hőkép (thermal image) és nem hőfénykép (thermal photograph). Így minden képi megjelenítés képnek minősül, de nem minden kép fénykép.
Az adatok megjelenítése döntő mozzanat a távérzékelésben. A kép elemzése, a különbségek felismerése és a felismerés képessége az emberi szem lehetőségeiben rejlik és egyben korlátozódik. Ezért a vizuális megjelenítés mellett szükség van az adatok számszerű vizsgálatára is, emiatt előnyben részesítjük a digitális adatformátumot, s így lehetőség nyílik a digitális képfeldolgozási módszerek alkalmazására.
A távérzékelési rendszerekben a vizsgálat tárgyáról visszavert vagy az általa kibocsátott sugárzást többféle módon lehet észlelni és feldolgozni. A két leggyakoribb rendszer a kamera és a pásztázó rendszer.
A kamera rendszert vagy más néven azonnali képkészítő (framing) rendszert az jellemzi, hogy a vizsgált felszín teljes területéről egyidejűleg készül felvétel. A keretező rendszerek közé tartoznak a fényképkészítő kamerák, a digitális video képkészítők (1.11. ábra).
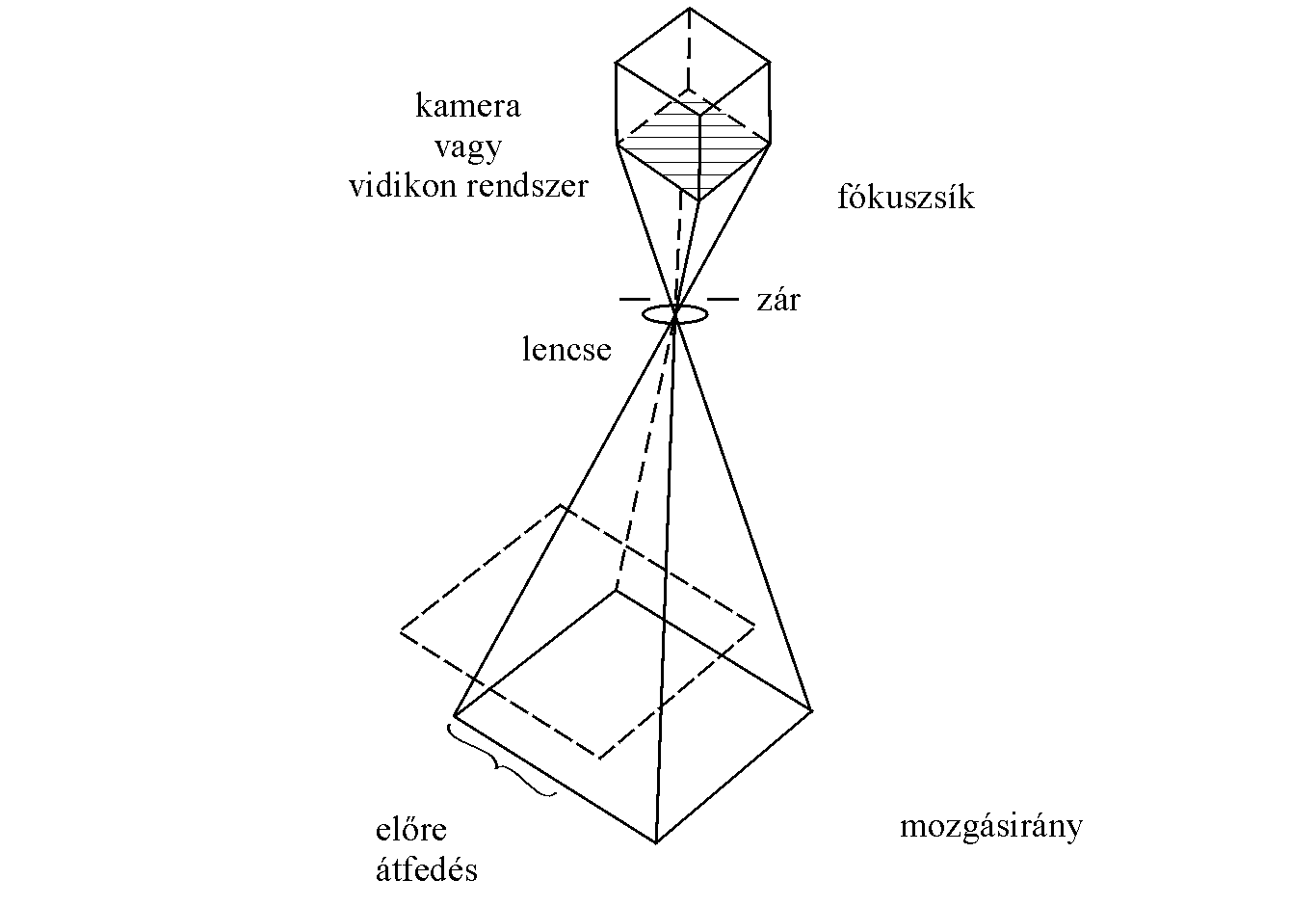
Az emberi szem is egy keretező rendszernek tekinthető. A kamerák (pl. KFA-1000 kamera a Resurs-F sorozaton) olyan lencséket használnak, melyek a képet a fókuszsíkra vetítik. A kép a fókuszsíkon élesen, kontrasztosan jelenik meg. A zárszerkezet adott időintervallumokban kinyílik, és ekkor fény jut a kamera belsejébe, ahol a kép a filmen rögzül. A kamerák filmfelületét ezüsttartalmú emulzióval vonják be. A vidikon típusnál (pl. a Landsat RBV), amely valójában egy televíziós kamera, a kép egy elektronikusan feltöltődő fotoszenzitív felületen képződik. Az elektronnyaláb végigsöpri a felületet és a töltéskülönbségeket érzékelve hozza létre a képet. Az elektronnyaláb így egy jelet képez, amely elektromos úton továbbítható és tárolható, pl. mágnesszalagon, majd végső formában filmen.
A kamerák keretei és a vidikon képek egymás után készülnek a rendszer mozgásával megegyező irányban. A szomszédos képek részben átfedik egymást (forward overlapping). Az átfedett részek alkalmasak sztereoképpárok létrehozására, melyekkel 3-dimenziós hatás érhető el (sztereofotogrammetria). A kamerában használt filmeken, az ultraibolya sávtól a visszavert infravörös tartományig (0,3–0,9 µm), az elektromágneses spektrum csak egy kis tartománya rögzíthető. Ebbe a tartományba beleesik a látható fény tartománya (0,4–0,7 µm) is. Egyes speciális vidikon rendszerek érzékenysége kiterjed a hőtartományú-infravörös sávra is.
A pásztázó rendszerekben egy egyszerű detektort találunk, amely a keskeny végigsepert területről származó sugárzást érzékeli. A felszínről kisugárzott vagy visszavert elektromágneses energiát érzékeli és a keletkező elektromos jel erőssége arányos a beérkezett fotonok számával. Az elektromos jeleket felerősítik, az adatokat rögzítőn tárolják vagy az adattovábbító rendszeren keresztül azonnal a földi fogadóállomásokra sugározza a rendszer, ahol újra előállítható a kép. Minden pásztázó rendszer a detektorral párhuzamos irányban pásztázza végig a vizsgált területet. A pásztázó rendszerek keresztsávos, köríves, sávmenti és oldalra tekintő (I.12a-d ábra) típusba sorolhatók.
A, Keresztsávos pásztázás
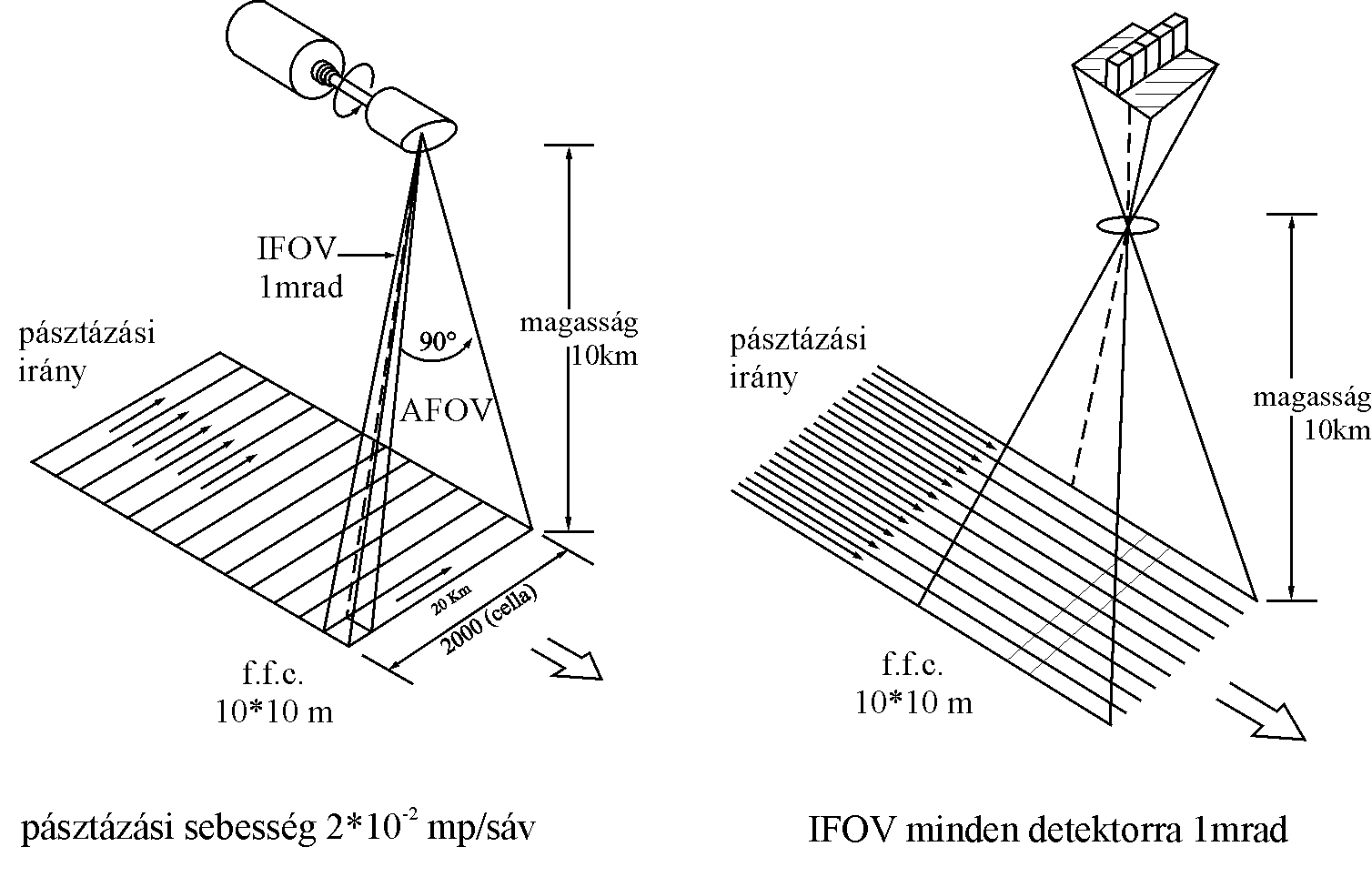
Ez a képkészítési mód igen gyakori a távérzékelési rendszerekben. A rendszer legfontosabb eleme egy tükör, amelyet egy motor forgat. A forgó tengely párhuzamos a repülés irányával (1.12a ábra). A tükör végigpásztázza a vizsgált területet a pálya irányára merőlegesen. A felszínről kibocsátott vagy visszavert energiát azután egy újabb optikai rendszer fókuszálja a detektor(ok) felületére.
A detektorok száma és a látószög meghatározza az egy detektorra jutó szögtartományt – melyet miliradiánban adnak meg – és egyúttal a detektorok pillanatnyi képmezőjének (IFOV-Instantaneous Field of View) méretét is. A képmező mérete határozza meg meg a szenzor térbeli felbontóképességét is. A felszíni felbontás egységének, a cellának (vagy pixelnek) a méretét a detektor pillanatnyi képmezőjének nagysága és az érzékelő rendszer magassága határozza meg. Ha például a detektor IFOV-ja 1 mrad és a szenzor 10 km magassan van, akkor a felszíni felbontás 10x10 m2, vagyis minden egyes cella egy 10x10 m2-es területet reprezentál.
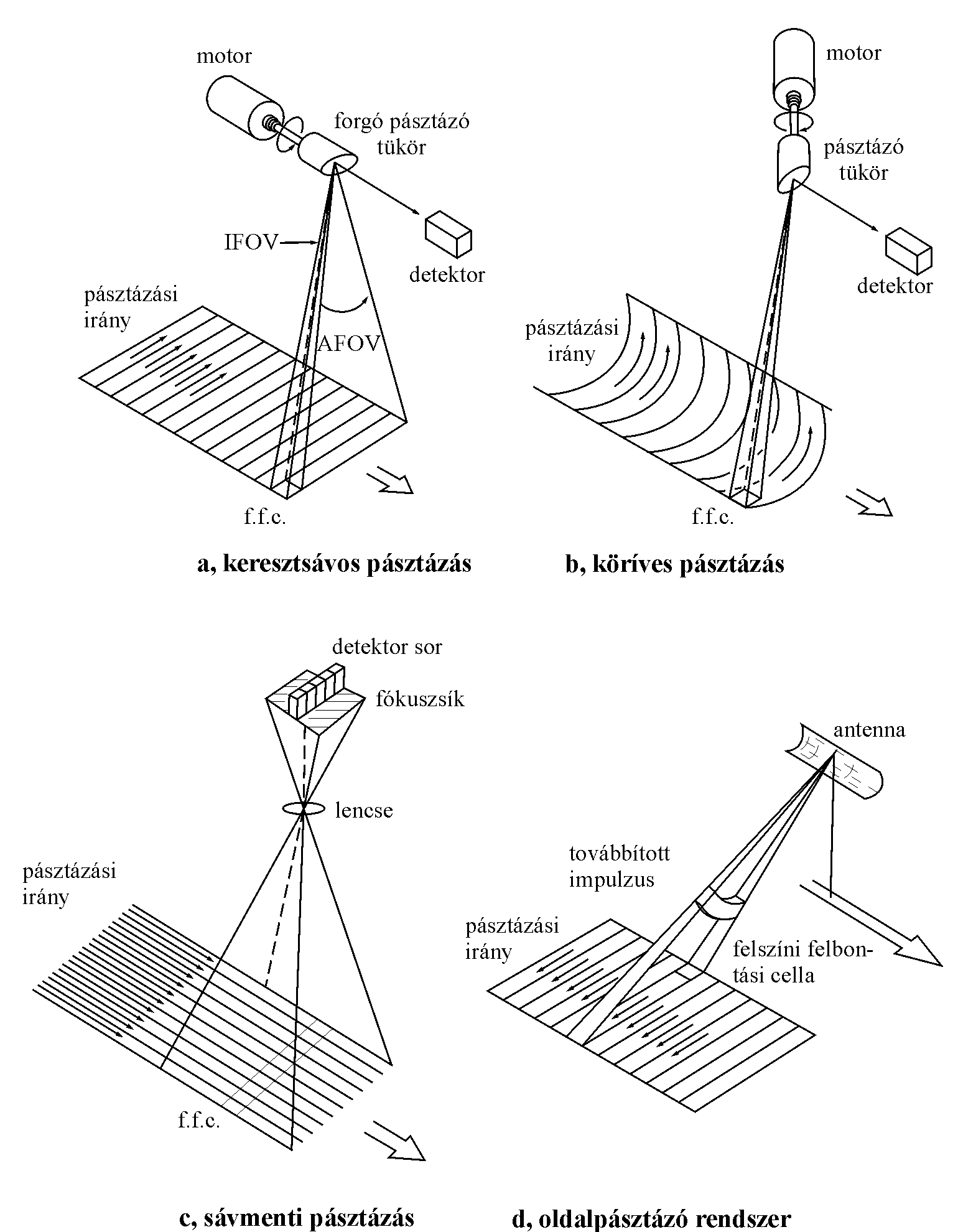
A teljes látószögmező (AFOV–Angular Field Of View) az a szögtartomány, amelyben a tükör végigpásztázza a vizsgált területet. Értékét általában fokokban adjuk meg. Az AFOV és a magasság meghatározza a lefedett terület szélességét, melyet a következőképpen számíthatunk ki
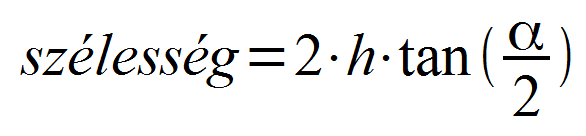
ahol
h = a szenzor magassága,
α = a teljes látószögmező (AFOV).
Az érzékelő és a felszín távolsága a kép szélei felé növekszik, ebből következően a felszíni felbontás is gyengébb a kép szélein, mint a kép közepén. Ez a hatás a keresztsávú szkennerek képeinél oldalirányú torzítás formájában jelentkezik. Nagy magasságban keringő műholdaknál kicsi IFOV is elég nagy terület lefedésére, ezért a forgó tükröt egy síktükörrel helyettesítik, amely előre-hátra oszcillál kb. 15°-ot. Ilyen megoldást találunk a Landsat MSS rendszerben.
A keresztsávú szkennereknél a felvételezési időt az IFOV mérete és a tükör sebessége határozza meg. Például egy repülőgépes szkenner esetében, ha az IFOV 1 mrad, a látószög mező 90°-os, és egy végigseprés ideje 2x10-2 mp/vonal, akkor az egy cellára jutó felvételezési idő 1x10-5 mp. Összehasonlítva a repülőgép sebességével, pl. 720 km/óra (200 m/s), akkor a szkenner sebessége 5000-szer nagyobb, mint a repülőgépé. Ez szükséges is, hogy ne legyenek feldolgozatlan területek az egymást követő sávok között (1.13a ábra). Ha a repülőgép repülési magassága 10 km, akkor a legkisebb vizsgált felszíni terület 10 m.
A rövid felvételezési idő nemcsak a beérkező energia mennyiségét és a detektorok által kibocsátott jel erősségét szabályozza. Az IFOV-nak és a spektrális sávszélességnek elég nagynak kell lennie ahhoz, hogy a jel erősebb legyen, mint a rendszer belső elektronikus zajai.
A detektor felületére beérkező, illetve a detektor által kibocsátott jel erőssége az alábbi tényezőktől függ:
energia fluxus: a felszínről kibocsátott vagy visszavert teljes energiamennyiség az észlelés ideje alatt. A látható fény tartományában működő detektoroknál a fluxus alacsonyabb borult, sötét napokon, mint napfényes időben.
magasság: egy adott térbeli felbontási cellára igaz, hogy a detektorhoz érkező energia mennyisége fordítottan arányos a repülési magasság négyzetével, vagyis minél távolabb van a detektor a felszíntől annál gyengébb a beérkező jel erőssége.
detektorok spektrális sávszélessége: azoknál a detektoroknál, melyek szélesebb hullámhossztartományt vizsgálnak a jel is erősebb. A teljes látható fény tartományát vizsgáló detektor sokkal nagyobb energiamennyiséget fogad, mint amelyik csak egy keskeny sávra, pl. a látható vörös sávra érzékeny.
IFOV, pillanatnyi képmező: mind a detektor érzékelő felületének fizikai mérete mind a szenzor optikai rendszerének fókusztávolsága meghatározza a pillanatnyi képmezőt. Kis IFOV esetén nagy lesz a térbeli felbontás, de jelentősen csökken a detektor által érzékelhető energia mennyisége, ebből következően a jel erőssége is.
felvételezési idő: felvételezési időnek nevezzük azt az időtartamot, amely a legkisebb felbontási terület végigpásztázásához szükséges. Hosszabb felvételezési idő esetén több energia jut el a detektorig, ezáltal erősebb jel keletkezik.
B, Köríves pásztázó rendszerek
A köríves pásztázó rendszerekben a tükör egy függőleges tengely mentén forog, így egy ív alakú felszíni területet pásztáz végig. Csak az előremutató pásztát rögzíti a rendszer. Ennek a módszernek az az előnye, hogy a szkenner és a vizsgált terület távolsága állandó marad a vizsgálat alatt, ezért a felszíni felbontási cella is mindig azonos méretű (1.12b ábra).
A rendszer hátránya viszont az, hogy a legtöbb képfeldolgozó rendszer a vonalas-sávos pásztázó technika elemzésére szolgál, így a köríveket mintegy kiegyenesítve olyan képet kapunk, melyet az alkalmazás előtt alá kell vetni egy kiterjedt geometriai korrekciónak. A köríves pásztázás felvételezési ideje sokkal rövidebb, mint a keresztsávos szkenneré.
C, Sávmenti pásztázó technika
A finomabb térbeli és spektrális felbontás érdekében meg kell növelni az egyes cellákra jutó felvételezési időt. Megoldás lehet a tükörrendszer megszüntetése és a detektor felbontása annyi elemre, ahány felbontási cella lefedi a teljes sávot (1.12c ábra). A detektorok sorba rendezve helyezkednek el a fókuszsíkon, ahova a lencserendszer az éles képet vetíti. A sordetektor iránya merőleges a repülés irányára. Minden detektorra egyidejűleg érkeznek a jelek. A szenzor a repülés irányával párhuzamosan pásztázza a pillanatnyi képmező által meghatározott területeket. Ezt a rendszert push-broom (toló-seprő) technikának is hívják.
A sávmenti pásztázó szkennereknél a legkisebb lefedett területre jutó felvételezési idő a felszínre vonatkoztatott sebességgel fejezhető ki. Egy repülőgépes sávmenti szkennerre (sebesség 200 m/s, cellaméret 10 m) ez 5x10-2 mp, amely 5000-szer nagyobb, mint a keresztsávú szkennernél (I.13b ábra). A megnövekedett felvételezési idő lehetővé teszi, hogy csökkenjen az IFOV mérete, vagy a detektorok szűkebb spektrális tartományban dolgozhatnak (nő a spektrális felbontás). A spektrális sávszélesség rendszerint 0,1 µm, de hiperspektrális szenzoroknál akár 1 nm is lehet.
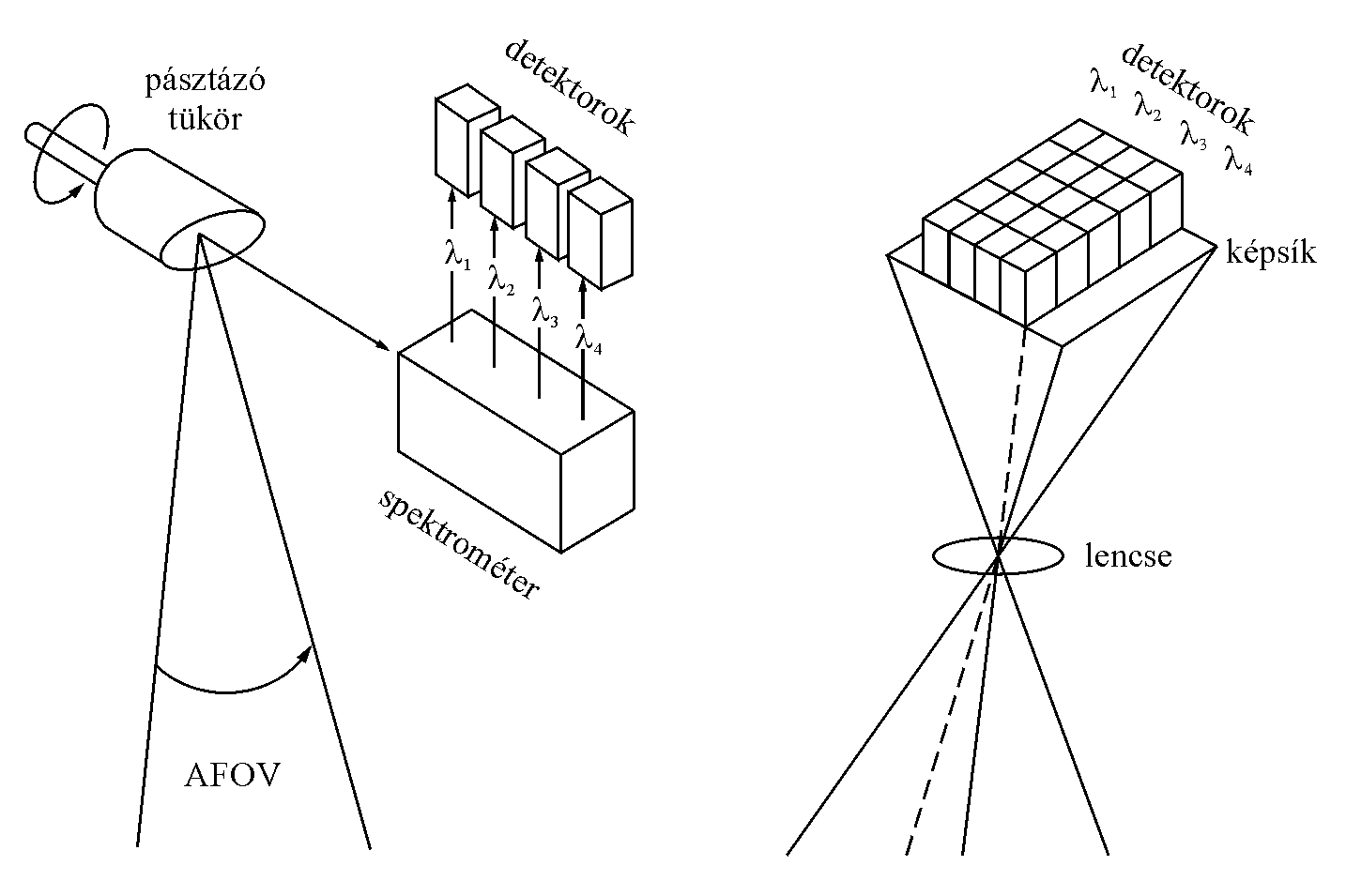
A keresztsávú és a sávmenti pásztázó szkennereket alkalmazzák a multispektrális távérzékeléses rendszerekben, ahol a detektorok előtt egy spektrométer bontja fel a polikromatikus sugárzást összetevőire és irányítja azokat a megfelelő számú detektor felületére (1.14. ábra).
D, Oldalra tekintő pásztázó technika
A passzív távérzékeléses rendszerek az előző három pásztázó rendszer valamelyikét hasznosítják. Az oldalra tekintő pásztázó (1.12d ábra) rendszert az aktív (pl. radar) rendszerekben helyezik el, ahol a repülési irányt tekintve oldalra néző antenna bocsát ki jeleket. A másik ilyen rendszer a hajókon elhelyezett oldalra tekintő szonár is, melyet a tenger medencealjzatának topográfiai vizsgálatakor alkalmaznak.
A pásztázó rendszerekben a beérkező sugárzást egy spektrométeren keresztül vezetik a detektorok felületére. A spektrométer (1.15. ábra), amely pontosabban egy monokrométer, a polikromatikus sugárzás egyedi spektrális komponenseit elemzi.
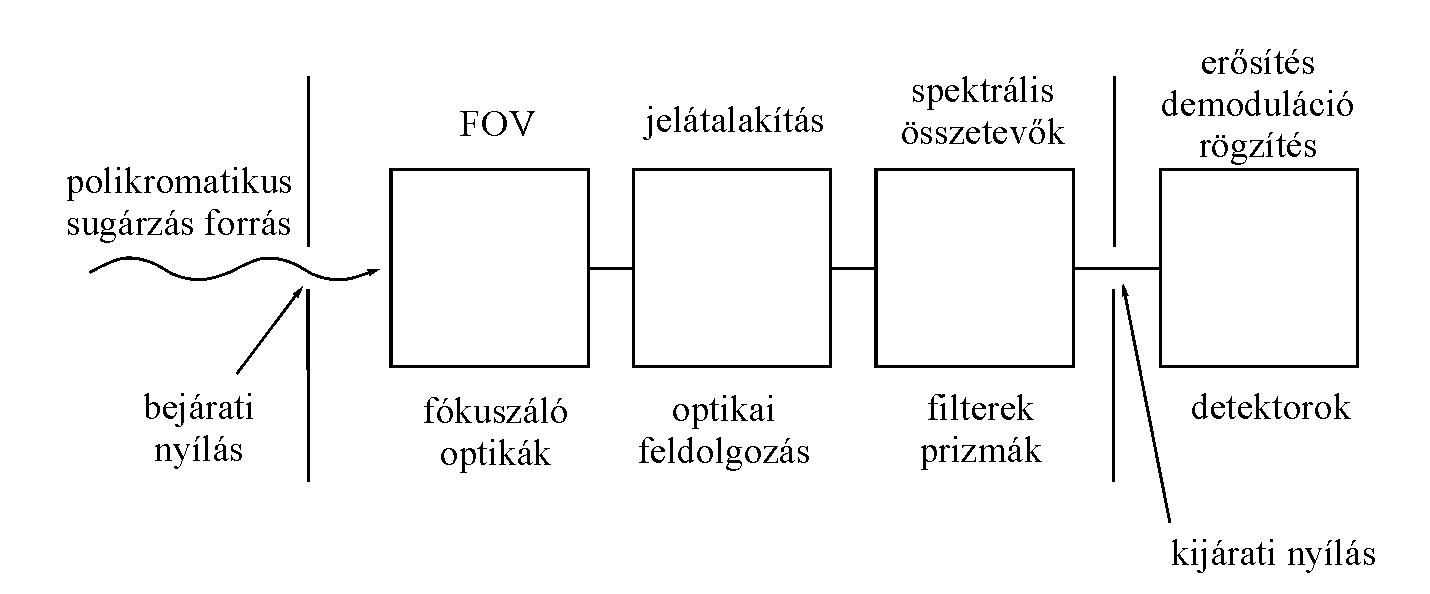
A polikromatikus sugárzás áthalad a berendezés bejárati nyílásán, zárszerkezetén. Ez a nyílás szabályozza a beérkező sugárzás intenzitását és gyakran meghatározza a pillanatnyi képmező nagyságát is. Miután a sugárzás áthalad a bejárati nyíláson, fókuszáló és erősítő rendszeren folytatja az útját. Az optikai rendszer lehet reflektív, refraktív vagy a kettő kombinációja. Számos spektrométerben a sugárzás egy optikai feldolgozó rendszeren alakul át optikai jelekké. Ez a jel a berendezés optikai osztályozó részén halad át. Itt különböző szűrők, prizmák találhatók, melyek áteresztő és reflektáló tulajdonsága függ a sugárzás hullámhosszától. Ebben a részben az összetett sugárzás spektrális komponenseire bomlik. A spektrális felbontás meg is előzheti az optikai feldolgozó rendszert. Ezután rendszerint a sugárzás fókuszálódik a kijárati nyílásra, amely szintén befolyásolja a képmező lehetséges méretét és a berendezés spektrális felbontását. A kijárati nyíláson áthaladva a sugárzás a detektorra vagy a detektorok sorozatára ér, ahol elektromos jellé alakul, felerősödik, különböző átalakító folyamaton megy át, majd rögzítésre kerül. Nagyon sokféle spektrométer létezik, de mindegyik tartalmazza ezeket a részelemeket.
Az így felépülő spektrométer az alapja számos távérzékeléses berendezésnek, pl. a spektrofotométernek. A spektrofotométerben a sugárzást egy belső sugárforrás biztosítja, amely pl. látható fényt vagy infravörös sugárzást bocsát ki. A kibocsátott sugárzás a vizsgált tárgyról visszaverődik és egy spektrométerben kerül elemzésre. A vizsgálat eredménye a belső sugárzásforrás által kibocsátott sugárzástól függ, ezért a kalibrációt egy ismert tulajdonságú tárgyon (referencia tárgyon) kell elvégezni és a későbbi vizsgálatok eredményét is a referencia tárgy segítségével lehet kifejezni.
Ha a spektrométer a céltárgyról visszavert sugárzást méri, akkor spektro-reflektométernek, ha pedig a tárgyon áthaladó sugárzást elemzi, akkor spektro-transzmisszióméternek nevezzük (1.16. ábra).
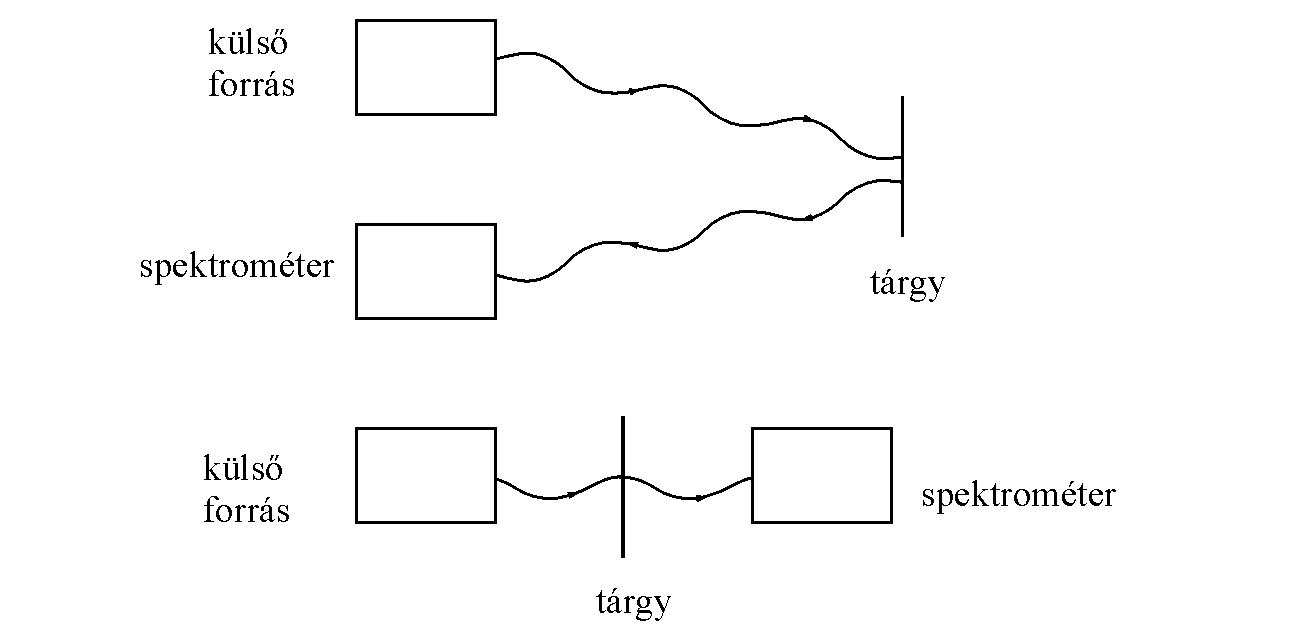
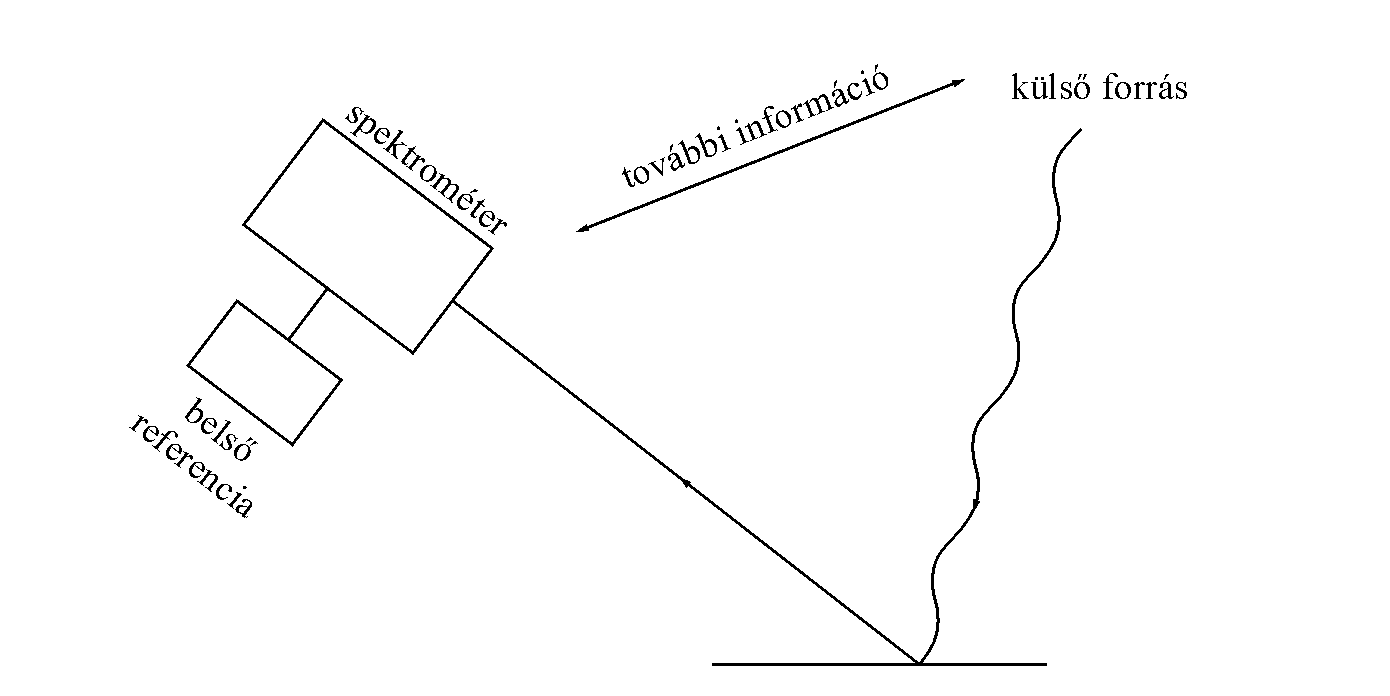
Amennyiben a berendezés nem tartalmaz belső sugárzásforrást és a sugárzás külső forrásból származik, akkor a berendezést spektroradiométernek, röviden radiométernek nevezzük. Ilyen berendezést használnak a természeti környezet vizsgálatakor, hiszen a spektrális elemzés így természetes feltételek mellett folyható. A spektroradiométer (1.17. ábra) a külső sugárzásforrásból származó energia spektrális mérésére szolgál, de emellett belső sugárzásforrás segítségével referencia-kalibráció végezhető, ezáltal abszolút sugárzásmérés történhet.